게시글 삭제
정말 삭제하시겠습니까?
로봇 팔 움직이는 속도 제어 해보기 | Embedded {no.80}
[주요 목차]
서보 모터의 기본 개념
서보 모터 속도 제어 방법
실전 코드 적용 및 활용
로봇 기술이 발전하면서 서보 모터는 다양한 분야에서 필수적인 요소로 자리잡고 있어요. 특히, 서보 모터의 속도 제어는 로봇 팔의 움직임을 자연스럽고 정밀하게 만드는 데 중요한 역할을 하죠. 많은 사람들이 서보 모터의 속도를 조절하는 데 어려움을 느끼고 있는데요, 이 글을 통해 서보 모터 속도 제어의 기본 개념과 실제 코딩 방법을 배울 수 있습니다. 이를 통해 로봇 팔의 움직임을 보다 매끄럽고 직관적으로 만들 수 있는 방법을 이해하게 될 거예요.
 로봇 팔 움직이는 속도 제어 해보기 | Embedded {no.80} · 현장 스냅 1
로봇 팔 움직이는 속도 제어 해보기 | Embedded {no.80} · 현장 스냅 1
서보 모터의 기본 개념
서보 모터는 특정 각도로 회전할 수 있는 모터로, 일반적으로 로봇 팔이나 RC 차량 등에서 사용되죠. 이 모터는 전기 신호에 따라 회전 각도를 조절할 수 있어요. 서보 모터는 대개 0도에서 180도까지 회전할 수 있으며, 이를 통해 로봇의 다양한 동작을 구현할 수 있습니다.
서보 모터의 작동 원리는 간단해요. 모터의 위치를 제어하기 위해 PWM(Pulse Width Modulation) 신호를 사용해서, 특정 시간 동안 신호를 보내면 모터가 그에 맞춰 지정된 각도로 회전하게 됩니다. 이때 모터의 속도는 PWM 신호의 주기와 모터에 주어지는 전압에 따라 달라지죠. 따라서 서보 모터의 속도를 제어하기 위해서는 PWM 신호를 적절히 조절하는 것이 중요합니다.
 로봇 팔 움직이는 속도 제어 해보기 | Embedded {no.80} · 참고 컷 2
로봇 팔 움직이는 속도 제어 해보기 | Embedded {no.80} · 참고 컷 2
서보 모터 속도 제어 방법
서보 모터의 속도를 천천히 제어하는 가장 쉬운 방법은 지연(delay) 함수를 사용하는 거예요. 이를 통해 서보 모터가 한 번에 큰 각도로 회전하는 것이 아니라, 조금씩 이동하도록 명령할 수 있습니다. 예를 들어, 180도를 회전할 때, 한 번에 180도를 돌리는 것이 아니라 1도씩 조금씩 회전하게 하는 것이죠.
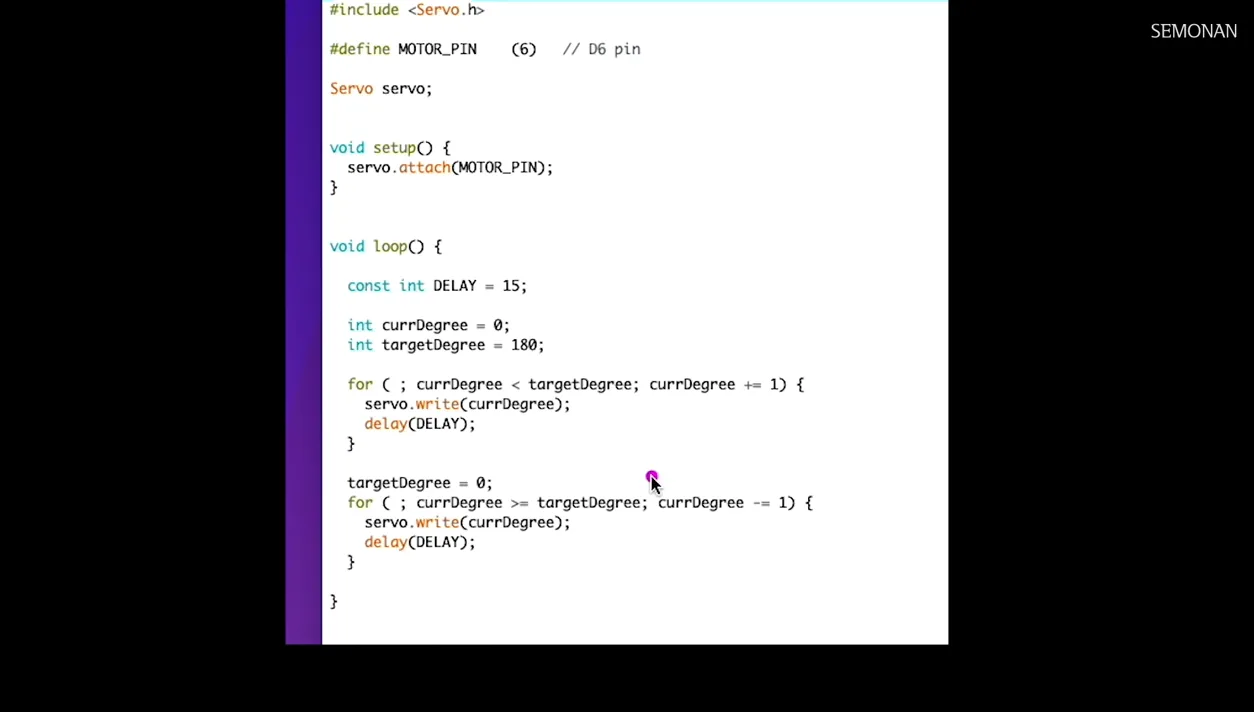
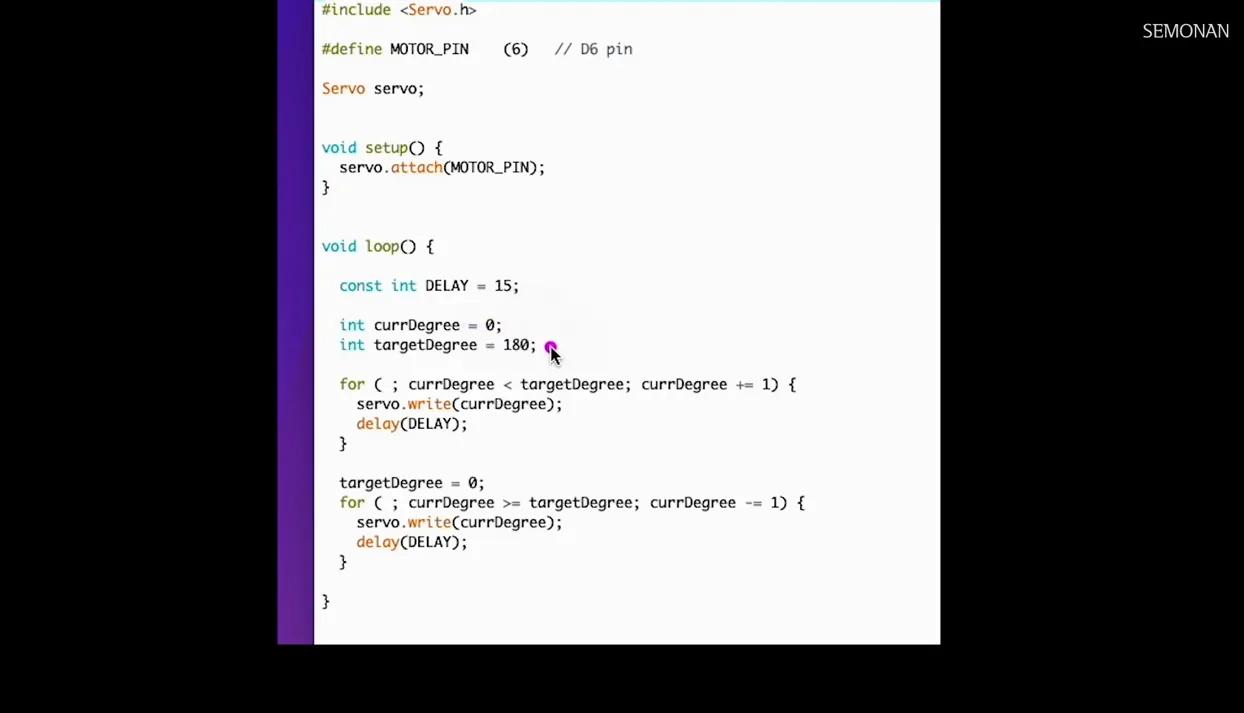
이때 사용하는 기본 코드는 다음과 같아요. 먼저, 서보 모터를 제어하기 위해 필요한 라이브러리를 추가하고, 사용할 핀을 설정한 후 서보 객체를 생성합니다. 이후, 서보 모터의 현재 각도를 저장할 변수를 만들고, 목표 각도를 설정합니다.
```cpp
include
Servo servo; int currDegree = 0; // 현재 각도 int targetDegree = 180; // 목표 각도
void setup() { servo.attach(6); // 6번 핀에 서보 모터 연결 }
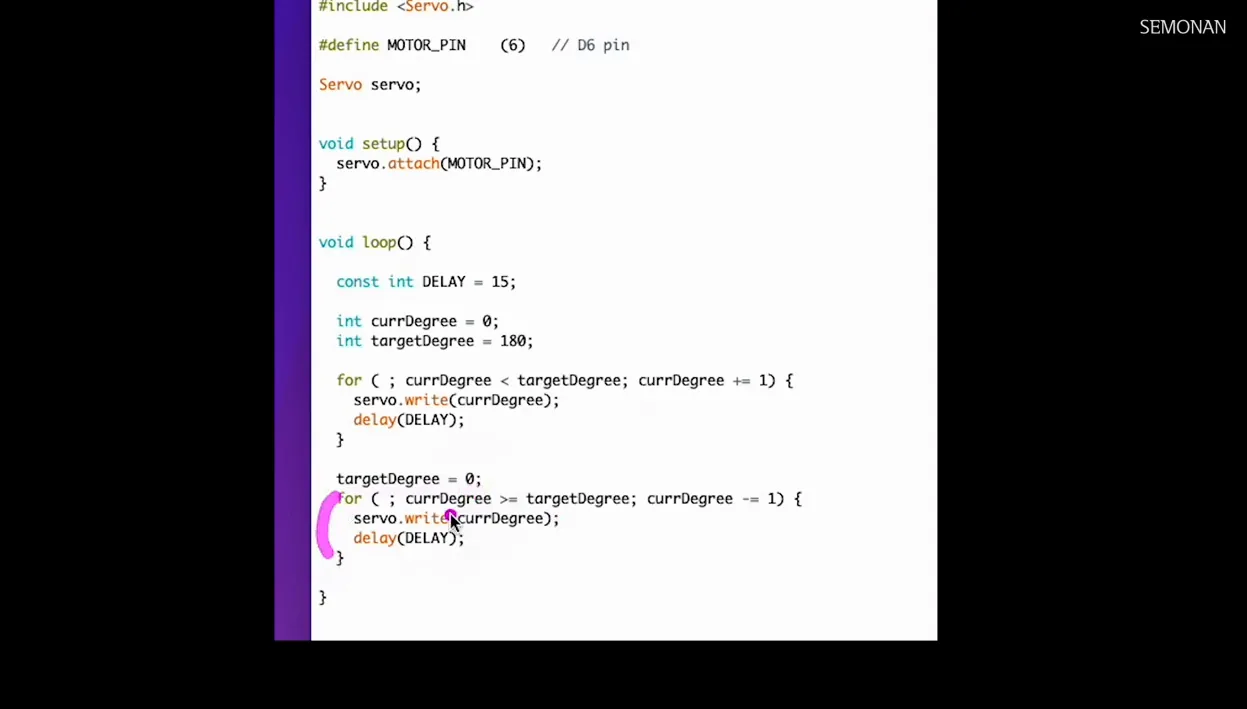
void loop() { for (currDegree = 0; currDegree <= targetDegree; currDegree++) { servo.write(currDegree); // 현재 각도 설정 delay(15); // 15ms 대기 }
// 목표 각도를 0도로 변경하여 역회전 targetDegree = 0; for (currDegree = 180; currDegree >= targetDegree; currDegree--) { servo.write(currDegree); // 현재 각도 설정 delay(15); // 15ms 대기 } } ```
이 코드는 서보 모터가 0도에서 180도, 다시 180도에서 0도로 천천히 움직이도록 설정되어 있어요. 이렇게 하면 모터의 속도를 조절할 수 있게 됩니다.
 로봇 팔 움직이는 속도 제어 해보기 | Embedded {no.80} · 주요 포인트 3
로봇 팔 움직이는 속도 제어 해보기 | Embedded {no.80} · 주요 포인트 3
실전 코드 적용 및 활용
코드를 적용한 후, 서보 모터의 움직임을 확인해보면, 초기에는 느리게 움직이다가 점점 빨라지고 다시 느려지는 모습을 볼 수 있어요. 이는 서보 모터의 속도를 부드럽게 조절하는 방법으로, 로봇 팔의 동작이 자연스러워지게 합니다.
실제로 이런 방식으로 코드를 수정하면, 다양한 속도 조절을 시도해볼 수 있어요. 예를 들어, delay 시간을 조정해서 더 빠르게 또는 느리게 움직이게 할 수 있습니다. 또한, 다양한 각도로 회전하는 서보 모터를 이용해 복잡한 동작을 구현할 수도 있죠.
다음 단계로는, 좀 더 발전된 속도 조절 알고리즘을 적용해볼 수 있어요. 예를 들어, 가속도나 감속도를 설정해 서보 모터의 움직임을 더 매끄럽게 만들 수 있습니다. 이를 위해서는 수학적인 알고리즘이 필요하지만, 기본적인 속도 제어 방법을 잘 익혀두면 다음 단계로 넘어가는 데 큰 도움이 될 거예요.
[자주 묻는 질문]
서보 모터 속도 제어는 왜 중요한가요?
서보 모터 속도 제어는 로봇 팔의 움직임을 자연스럽고 정밀하게 만드는 데 필수적입니다. 속도를 조절함으로써 반복적인 동작을 부드럽게 구현할 수 있으며, 이는 로봇의 작업 효율성을 높이는 데 기여하죠.
delay 함수 외에 서보 모터 속도를 조절할 방법이 있나요?
네, 다양한 방법이 있습니다. 예를 들어, PWM 신호의 주기를 변화시키거나 가속도 알고리즘을 적용하는 방법도 있어요. 이를 통해 서보 모터의 움직임을 더욱 세밀하게 제어할 수 있습니다.
서보 모터가 움직이지 않는데, 어떻게 해결할 수 있나요?
서보 모터가 움직이지 않는 경우, 전원 공급, 연결 상태, 코드의 오류 등을 점검해야 합니다. 또한, 핀 번호가 올바르게 설정되었는지, 서보 모터가 정상적으로 작동하는지 확인하는 것이 중요해요.