게시글 삭제
정말 삭제하시겠습니까?
로봇 팔! 고급지게 속도 제어 해보기 | Embedded {no.81}
[주요 목차]
로봇 팔의 속도 제어란?
가우시안 함수의 이해
서보 모터 속도 조절의 실제 구현
로봇 팔을 다루는 기술이 점점 발전하면서 속도 제어는 필수적인 요소가 되고 있어요. 특히 서보 모터를 활용한 로봇 팔의 속도를 조절하는 방법은 다양한 분야에서 활용될 수 있죠. 이 글을 통해 로봇 팔의 속도 제어에 필요한 가우시안 함수를 이해하고, 이를 실무에 어떻게 적용할 수 있는지 배워볼 거예요. 만약 여러분이 로봇 팔을 만들고 있다면, 이 내용을 통해 시간도 절약하고, 더 정교한 제어 시스템을 구축할 수 있을 거예요.
 로봇 팔! 고급지게 속도 제어 해보기 | Embedded {no.81} · 주요 포인트 1
로봇 팔! 고급지게 속도 제어 해보기 | Embedded {no.81} · 주요 포인트 1
로봇 팔의 속도 제어란?
로봇 팔의 속도 제어는 서보 모터의 회전 속도를 조절하는 과정이에요. 예를 들어, 로봇 팔이 어떤 작업을 수행할 때, 속도를 일정하게 유지하는 것이 아니라 처음에는 천천히 시작해서 점점 빨라졌다가 다시 천천히 끝나는 방식으로 움직일 수 있어요. 이를 통해 작업의 정밀도를 높이고, 부드러운 동작을 구현할 수 있죠.
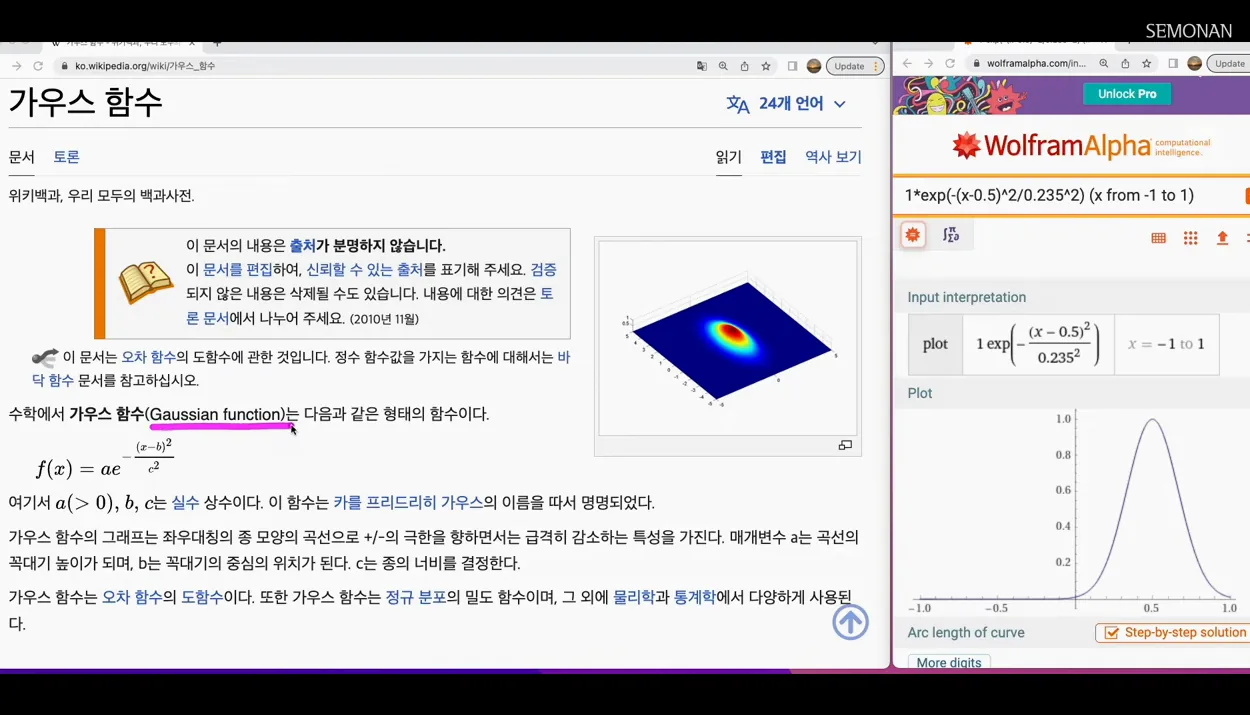
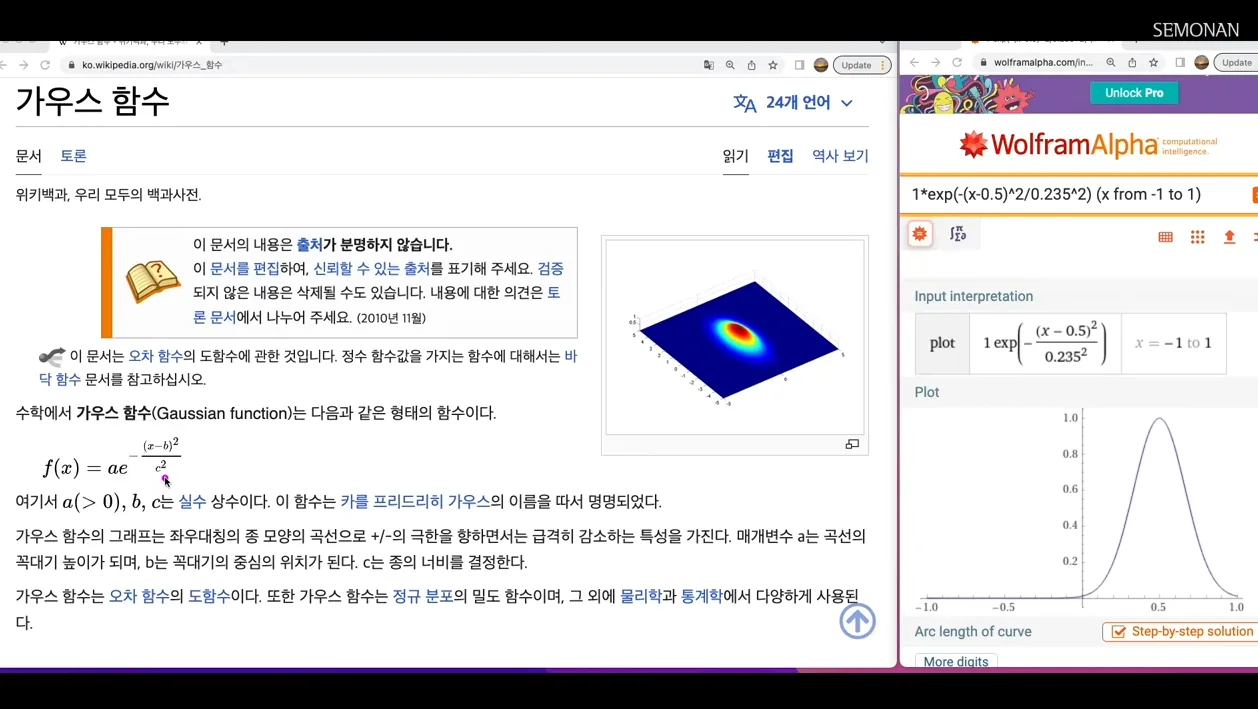
속도 제어는 단순히 서보 모터의 회전 속도를 변경하는 것만으로 이루어지지 않아요. 여기에는 수학적인 알고리즘이 필요해요. 특히 가우시안 함수를 활용하면 더욱 정교한 속도 제어가 가능하답니다. 가우시안 함수는 종 모양의 곡선을 그리는 함수로, 다양한 분야에서 활용되고 있어요. 예를 들어, 신호 처리나 통계학에서도 많이 쓰이죠.
[[ 로봇 팔! 고급지게 속도 제어 해보기 | Embedded {no.81} · 본문 이미지 2]
로봇 팔! 고급지게 속도 제어 해보기 | Embedded {no.81} · 본문 이미지 2]
가우시안 함수의 이해
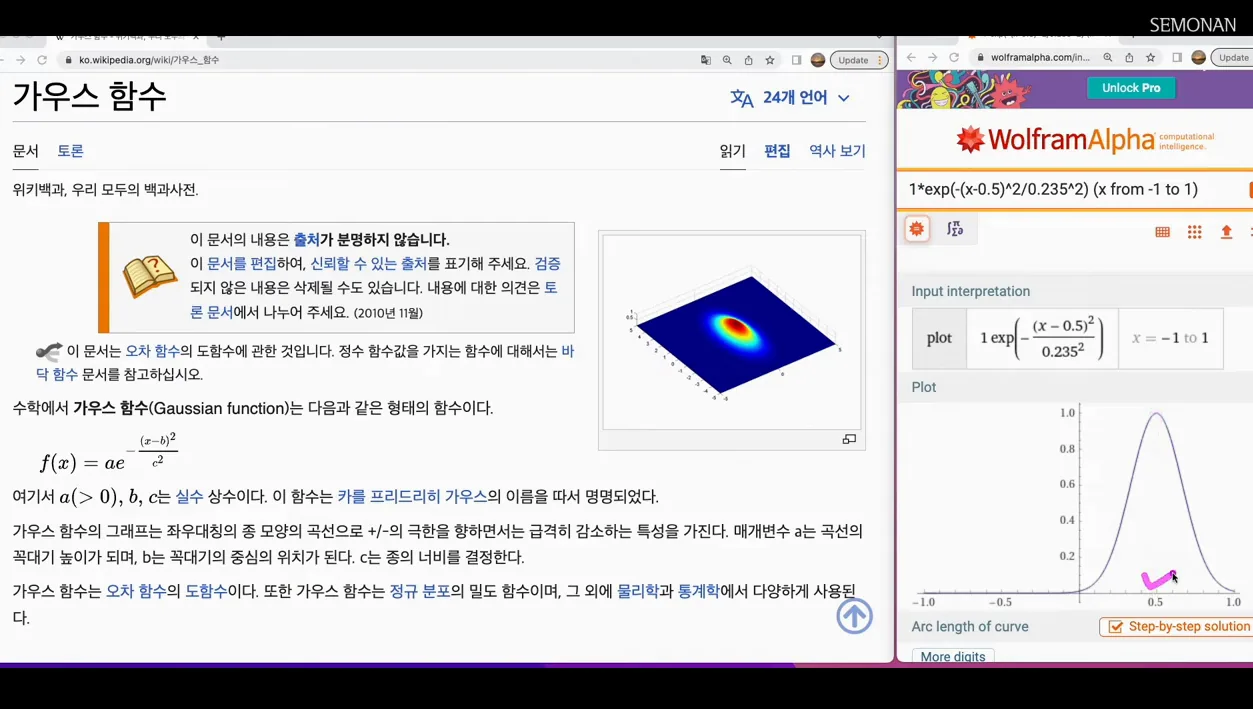
가우시안 함수는 수학적으로는 다음과 같이 표현돼요: [ f(x) = a \cdot e^{-\frac{(x-b)^2}{2c^2}} ] 여기서 a는 곡선의 높이, b는 곡선의 중심, c는 곡선의 너비를 결정해요. 이 매개변수들을 조절함으로써 곡선의 형태가 달라지죠. 예를 들어, a의 값을 조정하면 곡선의 최고점이 높아지고, b를 조정하면 곡선의 위치가 바뀌어요. c의 값을 조정하면 곡선의 폭이 넓어지거나 좁아지죠.
이를 통해 서보 모터의 속도를 제어할 때, 초기 속도, 최대 속도, 그리고 종료 속도를 자연스럽게 조절할 수 있어요. 이러한 수학적 모델링을 통해 여러분은 매개변수를 조정하면서 원하는 속도 패턴을 만들 수 있어요.
[[ 로봇 팔! 고급지게 속도 제어 해보기 | Embedded {no.81} · 주요 포인트 3]
로봇 팔! 고급지게 속도 제어 해보기 | Embedded {no.81} · 주요 포인트 3]
서보 모터 속도 조절의 실제 구현
이제 가우시안 함수를 활용해 서보 모터의 속도를 어떻게 조절할 수 있는지 알아볼까요? 기존에는 delay 함수를 이용해 속도를 고정시키는 방식이었지만, 가우시안 함수를 이용하면 속도를 변화시킬 수 있어요. 예를 들어, 서보 모터가 0도에서 180도까지 회전할 때, 처음에는 긴 delay를 주고, 중간에 짧은 delay를 주어 속도를 높인 후, 다시 긴 delay를 주어 속도를 줄일 수 있죠.
구현하기 위해서는 먼저 가우시안 함수를 코드에 적용해야 해요. 매개변수 a, b, c를 각각 설정하고, 이 값을 기반으로 delay를 계산해서 서보 모터에 전달하면 돼요. 이 과정을 통해 서보 모터는 부드럽고 자연스러운 속도로 움직일 수 있게 되죠.
이렇게 가우시안 함수를 활용하면 서보 모터의 속도를 정교하게 조절할 수 있어요. 이 기술은 로봇 팔뿐만 아니라, 다양한 자동화 시스템에서도 유용하게 활용될 수 있어요. 여러분도 이 방법을 통해 더 나은 성과를 얻으실 수 있을 거예요.
[자주 묻는 질문]
가우시안 함수는 어떤 분야에서 활용되나요?
가우시안 함수는 신호 처리, 통계학, 머신러닝 등 다양한 분야에서 활용돼요. 특히 데이터 분석에서 평균과 표준편차를 기반으로 하는 확률 분포를 표현할 때 많이 쓰이죠. 또한 이미지 처리에서도 블러링 효과를 주기 위해 사용되기도 해요.
서보 모터의 속도를 조절하기 위해 어떤 프로그래밍 언어를 사용해야 하나요?
서보 모터 속도 제어는 Arduino, Python, C++ 등 다양한 프로그래밍 언어로 구현할 수 있어요. 특히 Arduino는 하드웨어와의 호환성이 좋아서 로봇 팔 프로젝트에서 많이 사용되죠. 각 언어에 맞는 라이브러리를 활용해 쉽게 제어할 수 있어요.
가우시안 함수의 매개변수 a, b, c는 어떻게 설정하나요?
매개변수 a, b, c는 원하는 속도 패턴에 따라 설정해야 해요. a는 곡선의 높이를, b는 중심 위치를, c는 너비를 결정해요. 실험적으로 값을 조정해보면서 가장 자연스러운 움직임을 찾는 과정이 필요해요. 각 값에 따라 서보 모터의 속도가 달라지니 주의 깊게 조절하셔야 해요.